|
Bohan Yang This Fall (2026), I'll be starting as a CS PhD student at UW–Madison. Hi! I'm an undergrad studying Computer Science at Cornell University, advised by Tapomayukh Bhattacharjee on assistive robotics and human-in-the-loop robot learning at the Cornell EmPRISE Lab. I'm interested in building physical AI systems that learn from experience after deployment, adapting through interaction to handle long-tail failures in the real world. |
|
News
|
Selected Publications |
|
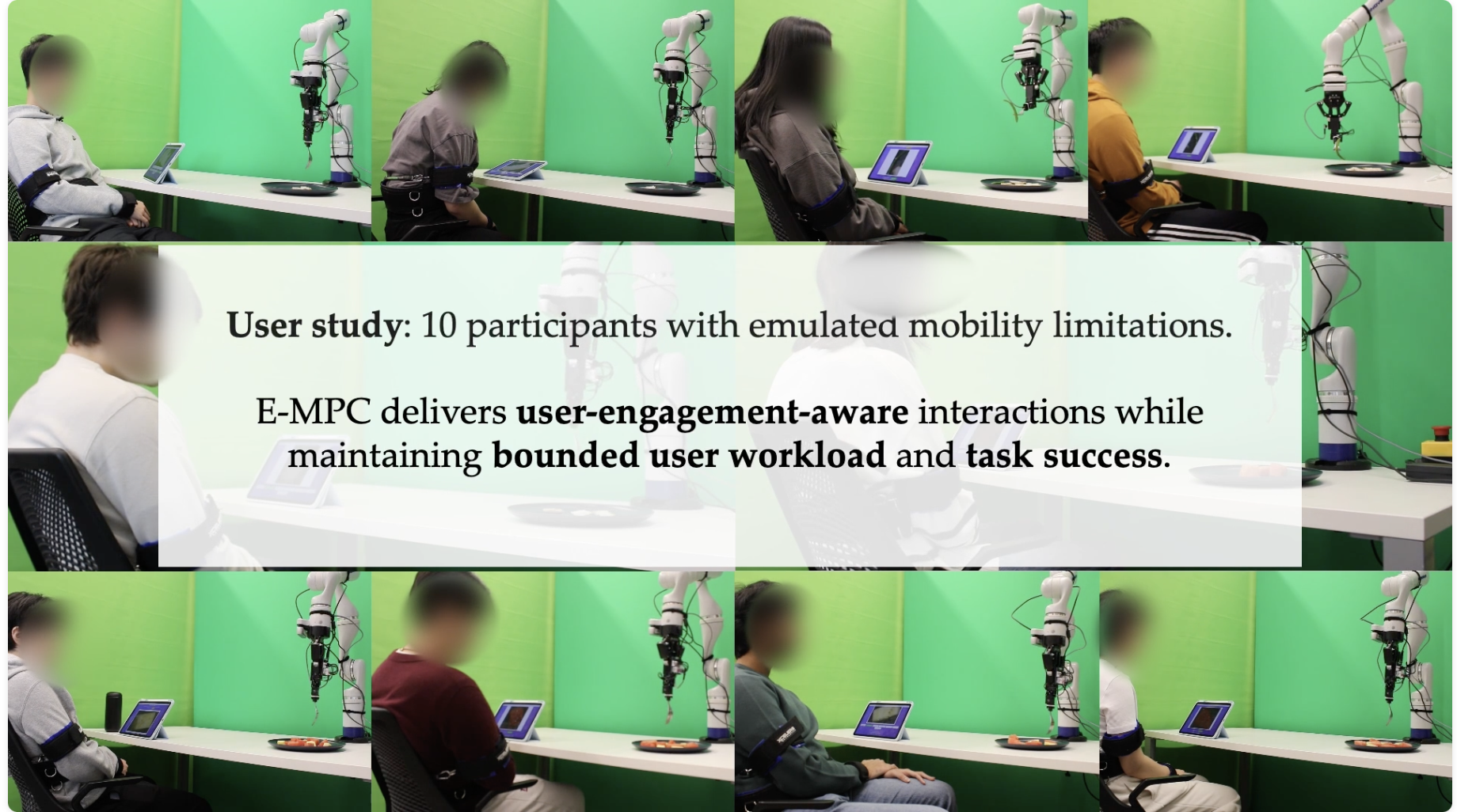
Beyond Failure Recovery: An Engagement-Aware Human-in-the-loop Framework for Robotic Systems
Jiaying Fang, Joyce Yang, Zhanxin Wu, Bohan Yang, Tapomayukh Bhattacharjee† RSS, 2026 project page / arXiv We propose Engagement-aware MPC (E-MPC), a user-engagement-aware method that plans interaction to maintain engagement while respecting a workload constraint. |
|
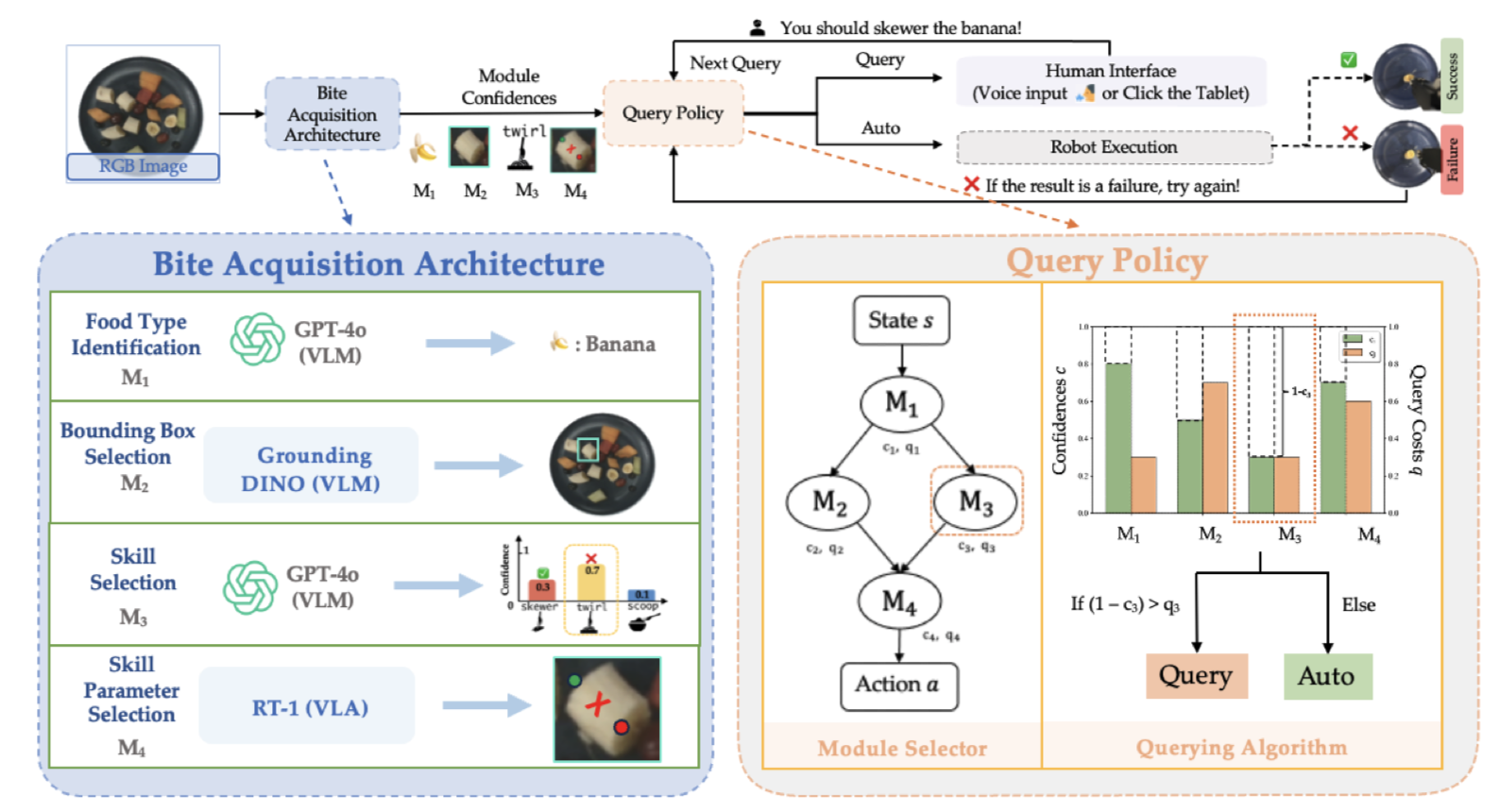
A Human-in-the-Loop Confidence-Aware Failure Recovery Framework for Modular Robot Policies
Rohan Banerjee, Krishna Palempalli*, Bohan Yang*, Jiaying Fang, Alif Abdullah, Tom Silver, Sarah Dean†, Tapomayukh Bhattacharjee† HRI, 2026 project page / arXiv / code A framework for modular policies that combines module-level uncertainty with models of human intervention cost to decide when and which module to query, evaluated on synthetic experiments and a robot-assisted bite acquisition system. |
TeachingTeaching Assistant, Cornell University.
|
|
Template adapted from Jon Barron. |